产品系列

本控制系统是具备RTCP核心控制算法的先进的控制系统,用来控制多轴数控加工中心,支持国际标准的12类五轴机床结构。操作软件基于windows操作环境,运算速度快,性能稳定,同时给与集成商充分的发挥空间。
RTCP 是什么:目前最先进的运动控制算法,俗称刀尖跟随,系统自身通过坐标换 算替代了后处理的换算过程,从而简化了程序代码,方便了机床操作,支持更多高 级功能。同时这个动作原理能最大限度的保证刀尖的准确位置、曲面加工效率、以 及工件表面的光滑度。
真五轴联动:假五轴联动,是通过编程软件和后处理器,将多轴刀具路径一次计算 出,但是各轴旋转分辨率和进给量是预先设定好的,如果偏心距过大或者刀具过长, 远端刀尖的分辨率无法保持、各轴速度协调度很低、联动的精度无法保证,并且代 码文件相当庞大。
真正的五联动并不能简单理解为五个轴一起运动,而是指五个轴能够根据旋转轴偏心距以最佳的速度和插补精度进行运动,从而保证刀尖的点位的空间精度。
目前市售几千甚至上万元的五轴运动控制系统,都不具备这项功能。因此无法做到真正意义的五轴联动。
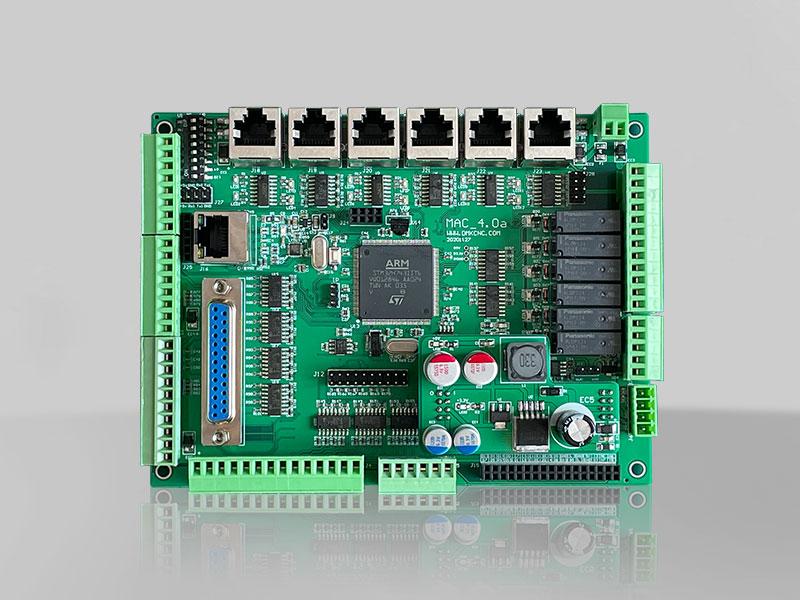
电压 | 24v 2A直流 |
保护 | 提供电源滤波器 |
隔离 | 板载Usb隔离芯片 |
通讯 | Usb DMA,usb线材不大于2米,可配专用加长线 |
屏蔽 | 雨大功率用电器保持30CM以上距离 |
五轴联动 | 支持多轴联动,支持RTCP刀尖跟随 |
轴数量 | 6个运动轴 |
速度 | 每个轴最高300K |
主轴 | 0-10v模拟量输出 |
输入信号 | 各轴回零减速,到位,超程,急停,对刀,伺服报警,等 |
输出信号 | 主轴,水泵,吹气,报警,换刀,刀库,准停等 |
手轮 | 6轴专用手轮,无延时卡顿 |
系统精度 | 0.001 |
轴输出信号 | 5v 差分信号 |
支持电机 | 泛用脉冲型伺服电机(差分),(混合)步进电机(差分) |
支持传感器 | NPN三线常开,两线机械式 |
回参考点 | 传感器减速,电机编码器Z信号准停 |
对刀长 | 可接电子对刀仪,实现自动对刀长,精度0.003 |
3D补偿 | 可设置机构偏心补偿,矢量补偿;工件坐标偏心补偿 |
代码格式 | 国际标准G代码格式,兼容funac |
G代码 | 直线插补,圆弧插补,钻孔循环,刀具长度补偿,等 |
M代码 | 主轴开关,切削液开关,RTCP开关,刀库进出,主轴换刀,暂停,循环指令开关,坐标系倾斜等 |
代码仿真 | 在线仿真g代码,检查超程等问题 |
三维显示 | 显示三轴运动轨迹 |
机械坐标 | 记录机床的机械零点,也是rtcp运算的参考点 |
工件坐标 | 加工时的工件坐标系,与出程序的工作平面对应 |
相对坐标 | 可以手动清零作为参考位置,不影响坐标位置 |
剩余坐标 | 当前位置距离本行程序结束剩余的距离 |
RTCP坐标 | 开启RTCP后的绝对位置 |